





























Роботы на орбите становятся популярнее, но остается множество технических проблем
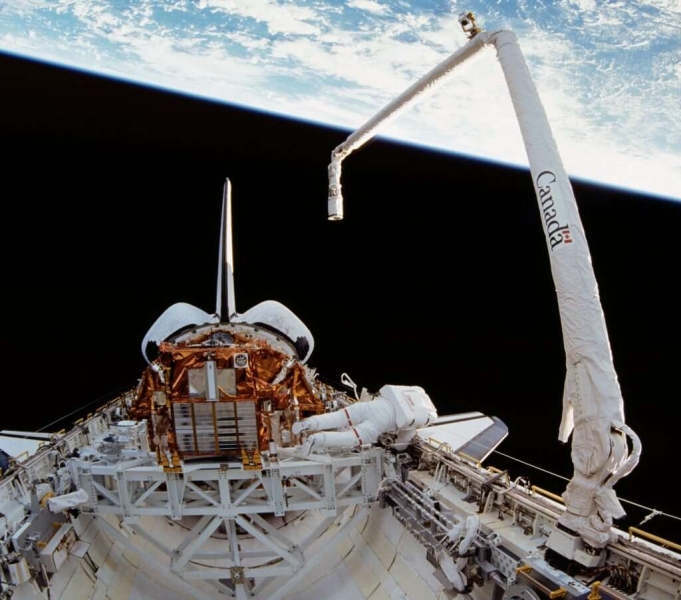
За последние сорок лет роботы стали играть более важную роль во всем — от сборки Международной космической станции (МКС) до недавних миссий по проверке концепции обслуживания вышедшего из строя спутника на орбите Земли. Опубликованная в журнале Advanced Intelligent Systems статья подробно описывает некоторые работы, которые еще предстоит проделать, чтобы воплотить мечту о полнофункциональных роботах в космосе.
Во-первых, это зрение. Хотя визуальное окружение в космосе может быть не таким хаотичным, как на Земле, заставить робота визуально понимать, на что он смотрит, может быть непросто, особенно если спутник неконтролируемо кувыркается.
Распознавание образов, таких как круги, расположенные вокруг стыковочных портов спутника, ожидающего обслуживания, по-прежнему затруднено. Отчасти это связано с тем, что вычислительная нагрузка, связанная с выполнением алгоритма распознавания, должна быть возложена на самого робота. Это требует увеличения вычислительной мощности, что напрямую связано с увеличением энергопотребления и тепла.
Когда робот поймет, куда он направляется и с чем пытается взаимодействовать, ему будет необходимо добраться до нужной области и эффективно выполнить свою работу. Здесь необходимо учитывать несколько факторов. Ученые представляют решения нескольких уникальных задач управления. В частности, команды движения, и особенно попытки переместить определенные объекты, вызывают такие явления, как вибрации в теле и манипуляторе робота. Алгоритмы динамического управления могут помочь ослабить некоторые из наиболее опасных вибраций, которые потенциально могут разорвать робота на части, если оставить их без контроля.
Другие факторы координации также могут вызывать трудности. Например, одновременная координация нескольких рычагов для взаимодействия с объектом является очень сложной.
Один из методов, помогающих эффективно управлять конечным устройством робота, заключается в том, чтобы позволить человеку управлять им дистанционно. Однако телеуправление требует времени, а время астронавта чрезвычайно ценно. Таким образом, предпринимаются усилия по телеуправлению роботами в космосе с Земли.
Недавно сообщалось о некоторых попытках сделать обратное, когда астронавт управлял роботом на Земле. Эти эксперименты были направлены на то, чтобы доказать концепцию управления роботами на поверхности других миров, таких как Луна или Марс. Эта форма телеуправления по—прежнему будет сталкиваться с теми же трудностями задержки — и более того, задержка может меняться в зависимости от того, где робот находится на своей орбитальной траектории.
Для решения этой проблемы были предложены различные решения, включая систему управления виртуальной реальностью, которая предсказывает, где будет находиться робот по истечении времени задержки. Принудительная обратная связь также является популярным вариантом, хотя она по-прежнему страдает от тех же проблем с задержкой по времени. Существует множество технических решений для преодоления этого препятствия, но ничто не может устранить тот факт, что сигналы не передаются мгновенно на большие расстояния.
